Robotics: Introduction
Robots are not just machines, they are many steps ahead a typical machine. Robots like machines can perform different tough jobs easily but the advancement is that they can do it by their own. Once programmed robots can perform required tasks repeatedly in exactly the same way.
Introduction
The modern definition of a robot can be an electro-mechanical device which follows a set of instructions to carry out certain jobs, but literally robot means a ‘slave’. Robots find wide application in industries and thus are called there as industrial robots and also in sci-fi movies as humanoids. This and coming articles will provide an introduction to the Robotics.
Robotics and Automation
When we think about robotics first thing that come to our mind is automation. Robots are known to perform tasks automatically without much human intervention, except for initial programming and instruction set being provided to them. The first machine, what I have seen in my childhood when we were on a visit to a milk processing plant, most close, to be called as a robot was a milk packaging machine. There was roll of packaging material running through the machine, each time half a liter of milk falls into the roll and then a mechanism in the machine seals and cuts the packet.
This machine can be a simple example of a very basic robot. It performs the specified sequence of operations repeatedly with the same accuracy. It was programmed and provided with the required material and then started.
Advancements in Robotics
The more advanced versions of robots seen now-a-days can perform operations adaptively, that is, changing the dimensions and other settings according to the requirements. One such advanced example of an adaptive robot is a stitching machine which can read the different dimensions of dress size on the personal card of a person and then cut the desired dress material and stitch it to the size fitting to the person.
From a broad view, robotics is actually the continuous endeavor of robotics engineers to make machines capable of performing tasks as delicately as human can do and also the complicated, tough and repeated tasks which humans would prefer not to do. The advancements in the field robotics are made possible by use of microprocessors and microcontrollers with the intelligent combination of them with servo motors, sensors and actuators.
Robotics: Future Scope
Now the scope of robotics has widened and the robots which can only work on preprogrammed instructions irrespective of the environments they are working in are soon going to become outdated. The robots which are being developed these days can sense their surroundings and behave according to what they sense and make judgments on their own to how to respond. Far are not the days when robots would even sense and respond to feelings and could even express how they feel.
Robotics: Scope and Limitations of Robots
Robotics engineers can design robots which can do a whole lot of things, ranging from delicate and precision tasks such as fitting small parts of watches and to the hazardous tasks such as fuelling the chambers of nuclear reactors. Robots are thought to be super-machines but they have limitations.
Despite the great advancements in the field of robotics and continuous efforts to make robots more and more sophisticated to match the capabilities of human beings and even surpass them, still, from a very scientific and logical point of view, robots developed up till these days are no way closer to human beings.
Scope and Limitations of Robots


In basic robotics we design machines to do the specified tasks and in the advanced version of it robots are designed to be adaptive, that is, respond according to the changing environment and even autonomous, that is, capable to make decisions on their own. While designing a robot the most important thing to be taken in consideration is, obviously, the function to be performed. Here comes into play the discussion about the scope of the robot and robotics. Robots have basic levels of complexity and each level has its scope for performing the requisite function.
The levels of complexity of robots is defined by the members used in its limbs, number of limbs, number of actuators and sensors used and for advanced robots the type and number of microprocessors and microcontrollers used. Each increasing component adds to the scope of functionality of a robot. With every joint added, the degrees of freedom in which a robot can work increases and with the quality of the microprocessors and microcontrollers the accuracy and effectiveness with which a robot can work is enhanced.


Example
To understand the scope for any robot of given complexity, we will discuss it with a very simple example. Consider a robot comprising of one member joined to the base with a revolute joint and a servo motor is connected to that revolute joint which is controlled by a microcontroller programmed to move the member through a certain degrees of rotation. This is the most basic robot which I could think of.
Scope: The motion of this robotic arm is restricted to a circular path. Any task which can be done by the motion along the circular arc can be performed by this robot. Say, we want to draw arcs on sheets of papers or we want to cut them in circular pieces that can be achieved by fitting a pencil and a cutter to the end of this robotic arm.
Limitation: Any point on this robotic arm can only move along a circular path. Any task involving motion other that the circular motion cannot be performed by such robot.
Scope of robots can be extended and limitations can be reduced by adding to the complexity of the robots. One can imagine of the possibilities of motions which can arise by simply adding one more limb to the existing one through a revolute joint and a servo motor. This is a very basic example; in fact, robotics is very vibrant field with infinite scope and an equal numbers of limitations ever reducing.
Classification of Robotic Systems

Robotics systems, an integral part of almost all manufacturing processes, are classified on the basis of their application. In this article we will learn about the main categories of this classification.
Introduction
Robotic systems, a way of automating manufacturing process and also reducing manual labor attached with it, are used extensively in almost all fields these days. However, there are still many auxiliary processes that require manual labor.
The manual labor is now getting reduced because of the introduction of industrial robots equipped with manipulators with several degrees of freedom and a dedicated controlled actuator for each of them. A manipulator with high degree of freedom is similar to a human hand in movement and functionality.
The control system of a manipulator can be adjusted according to the application. The manipulators are generally used in industrial robots that cater to various needs of the application at the same time.
Classification of Robotic Systems
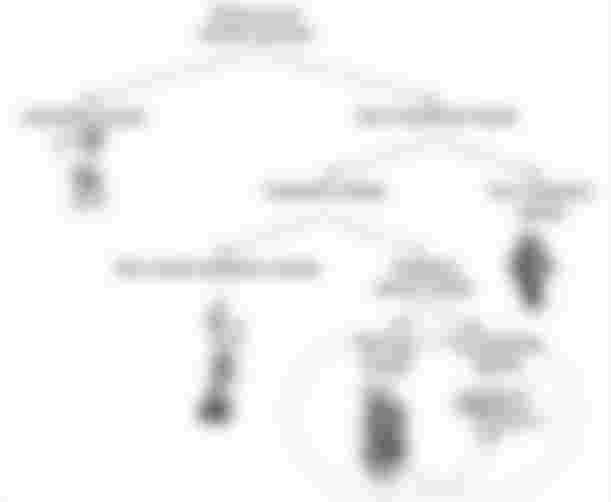
The robotic systems are classified mainly into three main types on the basis of application. They are:
○ Manipulation Robotic system
○ Mobile robotic system
○ Data acquisition and control robotic system
Manipulation Robotic system
The Manipulation Robotic system is the most extensively used robotic system that is found mainly in manufacturing industries. Manipulation robotic system comes in several forms, depending mainly on its application.
Mobile robotic system


A Mobile robotic system is usually an automated platform that carries goods from one place to another. The motion of the system can also be controlled autonomously and might have a pre-programmed destination from where the system might load or unload automatically.


Mobile robotic systems are also used mainly in industrial purposes for carrying tools and spare parts to the storage. One more application where mobile robotic systems are used is in farms, wherein they can be used for pulling equipments to plough the fields or for transporting agricultural products. Mobile robots are also used by petroleum and gas production companies for offshore oil and gas exploration and by salvage companies for searching for sunken ships. Mobility of these robots can be in the form of flying, swimming, or running on land.


Data acquisition and Control Robotic System
The Data acquisition and control robotic system is used for acquiring, processing, and transmitting important data used for generating various signals. Generally meant for activities that require less human participation, a control robotic system generates signals that can be used for controlling other robots. Data acquisition and control robotic system are also used for CAD systems used in engineering and business processes. Many mobile robotic systems, especially the unmanned craft used for the exploration of the sea bed are equipped with Data acquisition and control robotic system for procuring important information and sending it back to the shore in the form of signals.
Components Of Robots
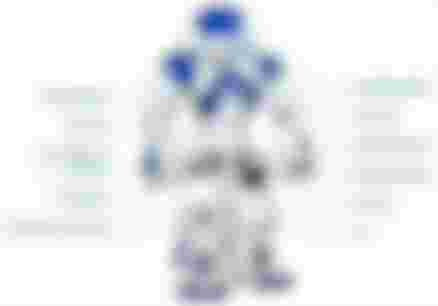

Robots consist of a variety of high tech components which are designed for accuracy, speed and convenience of operation. Some are for general purpose usage, while some are custom made to handle specific parts. The main components are the main body, end effectors, and grippers.


Main Body
An important component of a robot is the main body which holds the actuators and manipulators that create the activity for each axis of movement. The manipulator carries the end effectors which grip the objects. Mechanisms that provide response regarding the location are included for identification and rectification of any difference between the chosen position in accordance with the command and the existent position. The intelligence of the robot is in the control element, which directs the manipulator along the ideal route. A power supply is essential to activate the actuators.


End Effectors
End Effectors are a mechanism, which is located on the manipulator that pick up objects, grasp, and manage the movement of items in accordance with the designed parameters. They are designed specifically to handle desired parts and to move in the intended path. End Effectors can be used as nut drivers, accessory for welding processes, or guns for painting purposes. Types of End Effectors include:
Permanent Magnet End Effector: It consists of a permanent magnet that moves in an aluminium cylinder. When the actuator drives the magnet towards the front end of the cylinder, it holds ferrous parts. As the magnet is extracted from the cylinder, the magnetic field fades, and the parts are released. This type can be used for only ferrous parts, and has the benefit of managing parts with asymmetrical form as well as holding a number of parts concurrently.
Electro Magnet End Effector: It is easy to operate, and multiple end effectors can be positioned with the robot arm to perform multiple operations. Even with minor disturbance in the location of parts, or alterations in configuration and dimensions, these end effectors can function effectively. These types can be used for parts with uneven exterior shape, such as coarse ferrous castings or rounded components.
Vacuum End Effector: It consists of a cup-shaped component, and when it comes into contact with a smooth part, vacuum is created in the cup which ensures that the part remains attached. Controls are used to generate or remove vacuum. This type of end effectors is used for delicate parts.
Grippers
Grippers are of the following types:
Two Finger: These Grippers are used for gripping components that have uncomplicated form, and can be utilized for inner or outer gripping. The outer gripper is similar to thumb and index finger, and can be utilized for holding a small part or that which is located in a densely filled assembly of components. A tailored form consists of two parallel fingers with disposable inserts that are designed to handle special parts.
Three Finger: These types are similar to the thumb, index finger, and middle finger of the human hand, and are used for holding parts that are round or that need revolving.